
Convolutional Neural Networks (CNNs) Demystified: A Visual and Practical Learning Guide
Step-by-step explanation with real examples, visual animations, architecture diagrams, and practical workflows

What is a CNN?
A Convolutional Neural Network (CNN) is a type of deep learning model mainly used for image classification, object detection, and image recognition.
CNNs work by:
Automatically extracting features (like edges, shapes) from images
Reducing the image dimension while preserving important content
Using these features for classification or other tasks
In Convolutional Neural Networks (CNNs), convolution refers to the mathematical operation that slides a filter (or kernel) over an input (like an image) to produce a feature map. It's a core process used to extract spatial features like edges, textures, patterns, etc., from the input data.
What is Convolution in Simple Terms?
Imagine a flashlight scanning across a room. At each position, it focuses on a small region and gathers information. That’s exactly what a convolution operation does:
A small matrix (filter or kernel) moves across the image.
At each position, it performs element-wise multiplication between the filter and the region it covers.
It sums the results to produce a single value in the output (called the convolved feature or feature map).
Why Convolution?
It helps the model focus on important features like:
Edges (vertical, horizontal)
Corners
Textures
Repeated patterns
This process helps the network learn hierarchical features, going from low-level (edges) to high-level (object parts or full objects) as we go deeper.
Real-world Applications of CNN:
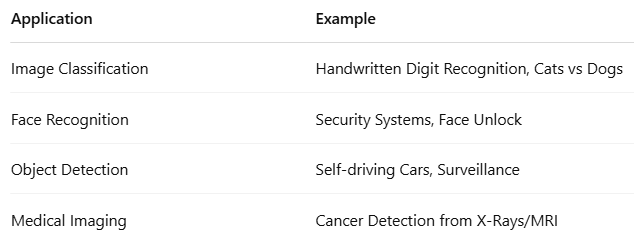
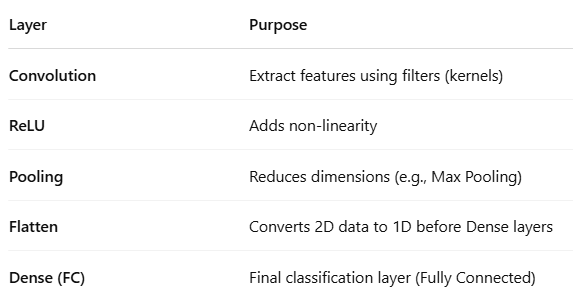
Key Components of a CNN:
Step-by-Step Code: Simple CNN using Keras
import tensorflow as tf
from tensorflow.keras import layers, models
from tensorflow.keras.datasets import mnist
from tensorflow.keras.utils import to_categorical
# Step 1: Load Data
(X_train, y_train), (X_test, y_test) = mnist.load_data()
# Step 2: Preprocess Data
X_train = X_train.reshape((X_train.shape[0], 28, 28, 1)) / 255.0
X_test = X_test.reshape((X_test.shape[0], 28, 28, 1)) / 255.0
y_train = to_categorical(y_train)
y_test = to_categorical(y_test)
# Step 3: Build CNN Model
model = models.Sequential([
layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)), # Convolution
layers.MaxPooling2D((2, 2)), # Pooling
layers.Conv2D(64, (3, 3), activation='relu'), # Another Conv
layers.MaxPooling2D((2, 2)), # Another Pooling
layers.Flatten(), # Flatten before FC
layers.Dense(64, activation='relu'), # Fully Connected
layers.Dense(10, activation='softmax') # Output layer for 10 classes
])
# Step 4: Compile the Model
model.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
# Step 5: Train the Model
model.fit(X_train, y_train, epochs=5, batch_size=64, validation_split=0.1)
# Step 6: Evaluate the Model
test_loss, test_acc = model.evaluate(X_test, y_test)
print(f"Test Accuracy: {test_acc:.2f}")
CNN Model - Step-by-Step Flow:
This sequence explains how an input image passes through various layers of a Convolutional Neural Network (CNN) for prediction.
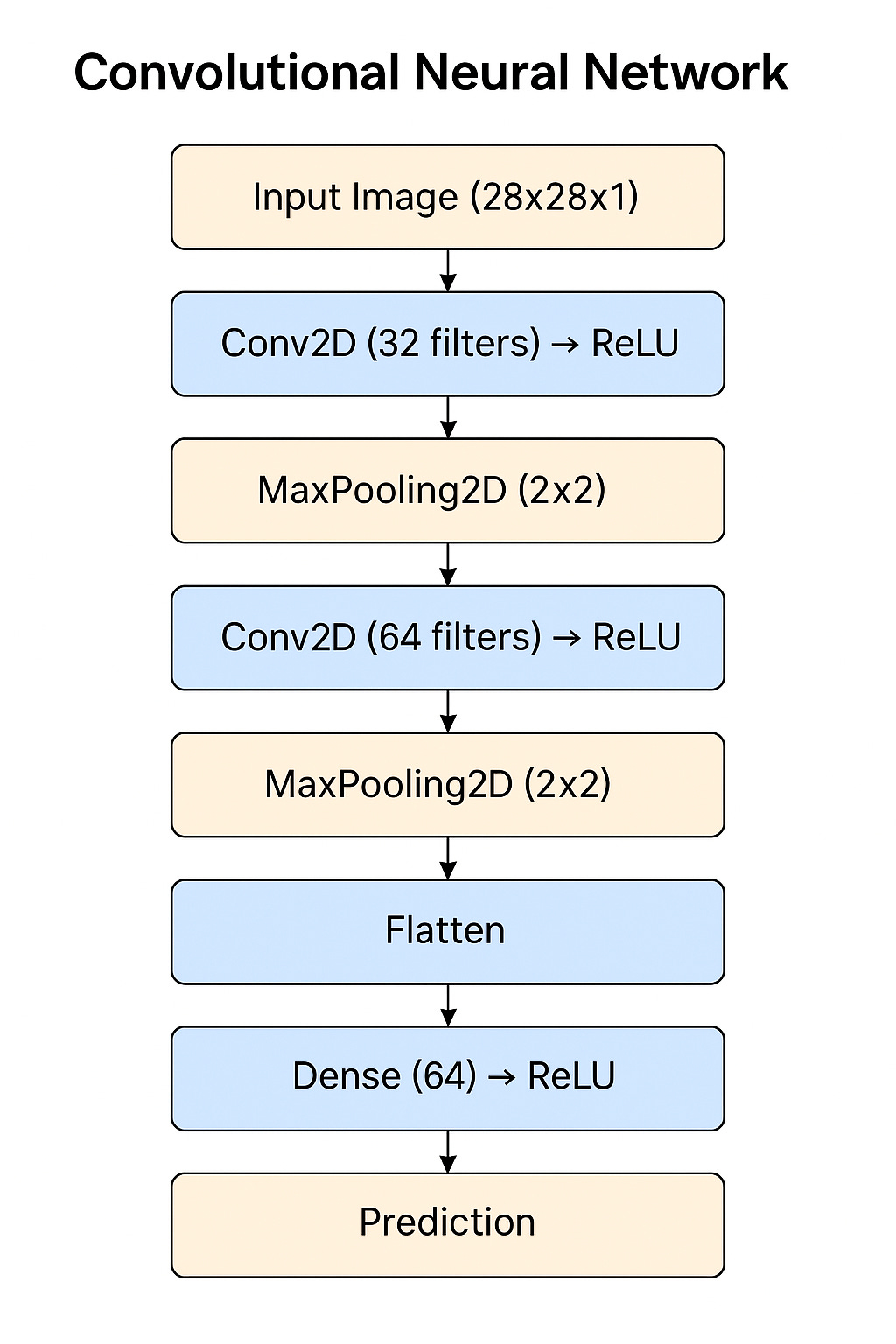
Step 1: Input Image
Provide the input image of size
(28 x 28 x 1).
Step 2: Convolution Layer 1
Apply
Conv2Dwith32 filtersto extract features.
Step 3: Activation - ReLU
Apply
ReLUActivation Function on the output ofConv2D (32 filters).
Step 4: MaxPooling Layer 1
Perform
MaxPooling2D (2x2)to downsample the feature map from Step 3.
Step 5: Convolution Layer 2
Apply
Conv2Dwith64 filterson the output from Step 4 for deeper feature extraction.
Step 6: Activation - ReLU
Apply
ReLUActivation Function on the output ofConv2D (64 filters).
Step 7: MaxPooling Layer 2
Perform
MaxPooling2D (2x2)on the output from Step 6 for further downsampling.
Step 8: Flatten Layer
Flatten the output from Step 7 into a 1D vector to prepare for Dense Layers.
Step 9: Dense Layer
Apply
Dense Layerwith64 neuronsfor learning complex patterns.
Step 10: Activation - ReLU
Apply
ReLUActivation on the output of Dense Layer.
Step 11: Output Layer - Prediction
Perform final prediction using
Softmaxto classify the input image into one of the target classes.
Explanation:
1. Import Required Libraries
import tensorflow as tf
from tensorflow.keras import layers, models
from tensorflow.keras.datasets import mnist
from tensorflow.keras.utils import to_categoricalPurpose:
tensorflow: Deep Learning Librarylayers: For CNN layers like Conv2D, MaxPooling2D, etc.models: To create a Sequential modelmnist: Dataset of handwritten digits (0 to 9)to_categorical: Converts labels like 5 → [0 0 0 0 0 1 0 0 0 0] (One Hot Encoding)
2. Load MNIST Dataset
(X_train, y_train), (X_test, y_test) = mnist.load_data()X_train→ 60,000 training images of size 28x28 pixelsy_train→ 60,000 labels (digits 0 to 9)X_test→ 10,000 test imagesy_test→ 10,000 test labels
3. Data Preprocessing
X_train = X_train.reshape((X_train.shape[0], 28, 28, 1)) / 255.0
X_test = X_test.reshape((X_test.shape[0], 28, 28, 1)) / 255.0Why reshape?
CNN expects input as:
(batch_size, height, width, channels)Here:
28x28 image with 1 channel (Grayscale)
Why divide by 255?
To normalize pixel values between 0 and 1 (since original pixel values are 0-255).
4. Convert Labels to One-Hot Encoding
y_train = to_categorical(y_train)
y_test = to_categorical(y_test)For example:
Label
5becomes:[0 0 0 0 0 1 0 0 0 0]
5. Build the CNN Model
model = models.Sequential([
#Layer 1: Convolution Layer
layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)),
layers.MaxPooling2D((2, 2)),
layers.Conv2D(64, (3, 3), activation='relu'),
layers.MaxPooling2D((2, 2)),
layers.Flatten(),
layers.Dense(64, activation='relu'),
layers.Dense(10, activation='softmax')
])
What is models.Sequential([])?
A Sequential model is a linear stack of layers — you build the model layer-by-layer in order.
Layer 1: Convolution Layer
layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1))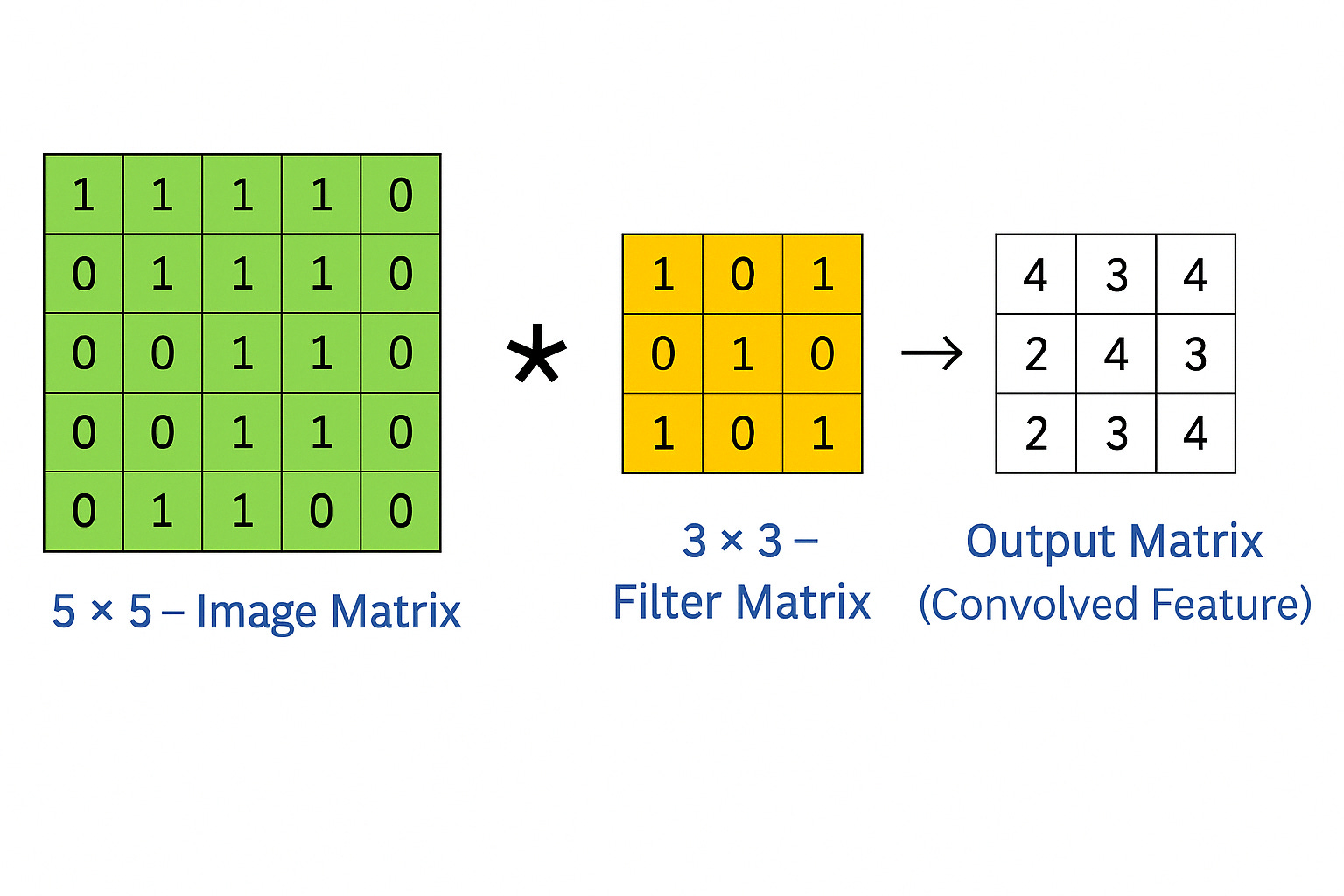
Meaning:
32 filters (also called kernels)
Each filter is of size 3x3
ReLU activation is applied after convolution
Input shape is 28x28x1 (1 channel → grayscale image)
Parameters:
filters: Number of filters (32 features will be learned)kernel_size: Size of each filter (3x3 window moves over the image)activation: Applies a non-linear function (ReLU = max(0, x))input_shape: Shape of input data
Analogy:
Think of filters as magnifying glasses that scan an image for features.
One filter might detect vertical edges
Another may detect horizontal edges
It's like scanning an X-ray through different lenses to detect bones, tissues, etc.
What is a Filter?
A filter (or kernel) is a small matrix (e.g., 3x3) that slides over the image and performs a mathematical operation (convolution) at every step.
Each filter extracts a different feature from the image — such as:
Edges
Curves
Texture
Patterns (like corners)
Example: One 3x3 Filter
Let's say you have a 3x3 filter:
[[-1, -1, -1], [ 0, 0, 0], [ 1, 1, 1]]This is a Sobel filter, and it's used to detect horizontal edges.
If you slide this filter over an image, you'll get a feature map that highlights horizontal patterns in the image.
Now Imagine: 32 Filters
Each filter is randomly initialized and learns a specific pattern during training.
So:
Filter 1 may detect vertical lines
Filter 2 may detect diagonal edges
Filter 3 may detect circles or loops (like in digit 8)
...
Filter 32 may detect texture, corner orientation, or stroke width
Output Shape
If the input image is 28x28x1, the output after:
Conv2D(32, (3, 3), activation='relu')Will be: 26x26x32
Why 26?
Because a 3x3 filter reduces the image dimension:
New size = (Old size - Filter size) + 1 = (28 - 3) + 1 = 26Why 32?
Because we applied 32 filters → We get 32 such feature maps.
Visual Example (Text-based)
Original (3x3 part of image):
[200, 200, 200] [ 0, 0, 0] [200, 200, 200]Apply Horizontal Edge Filter:
[-1, -1, -1] [ 0, 0, 0] [ 1, 1, 1]Output of convolution:
= (200*-1 + 200*-1 + 200*-1) + (0*0 + 0*0 + 0*0) + (200*1 + 200*1 + 200*1) = -600 + 0 + 600 = 0That one output becomes a pixel in the feature map.
Layer 2: Max Pooling
layers.MaxPooling2D((2, 2))This layer reduces the spatial size (width and height) of the feature maps from the convolutional layers — by selecting only the most important values from a patch of values.
Meaning:
Reduces the size of the feature map.
From 26x26 → 13x13 (if stride=2)
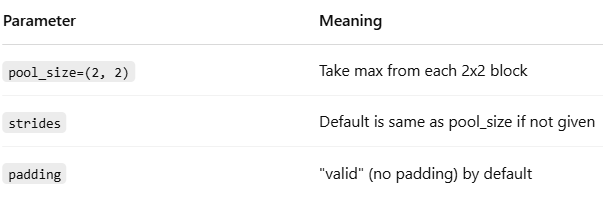
Parameters:
pool_size=(2, 2): Looks at each 2x2 patch and picks the maximum value
Analogy:
Like zooming out on a photo — you keep the most important pixels (e.g., the sharpest edges) and discard the rest.
Imagine compressing a photo for faster loading while still keeping important visual information.
Purpose of Max Pooling
Downsample the feature maps
Reduce computation
Prevent overfitting
Keep important features
Retain translation invariance (important feature doesn't move much if the image shifts slightly)
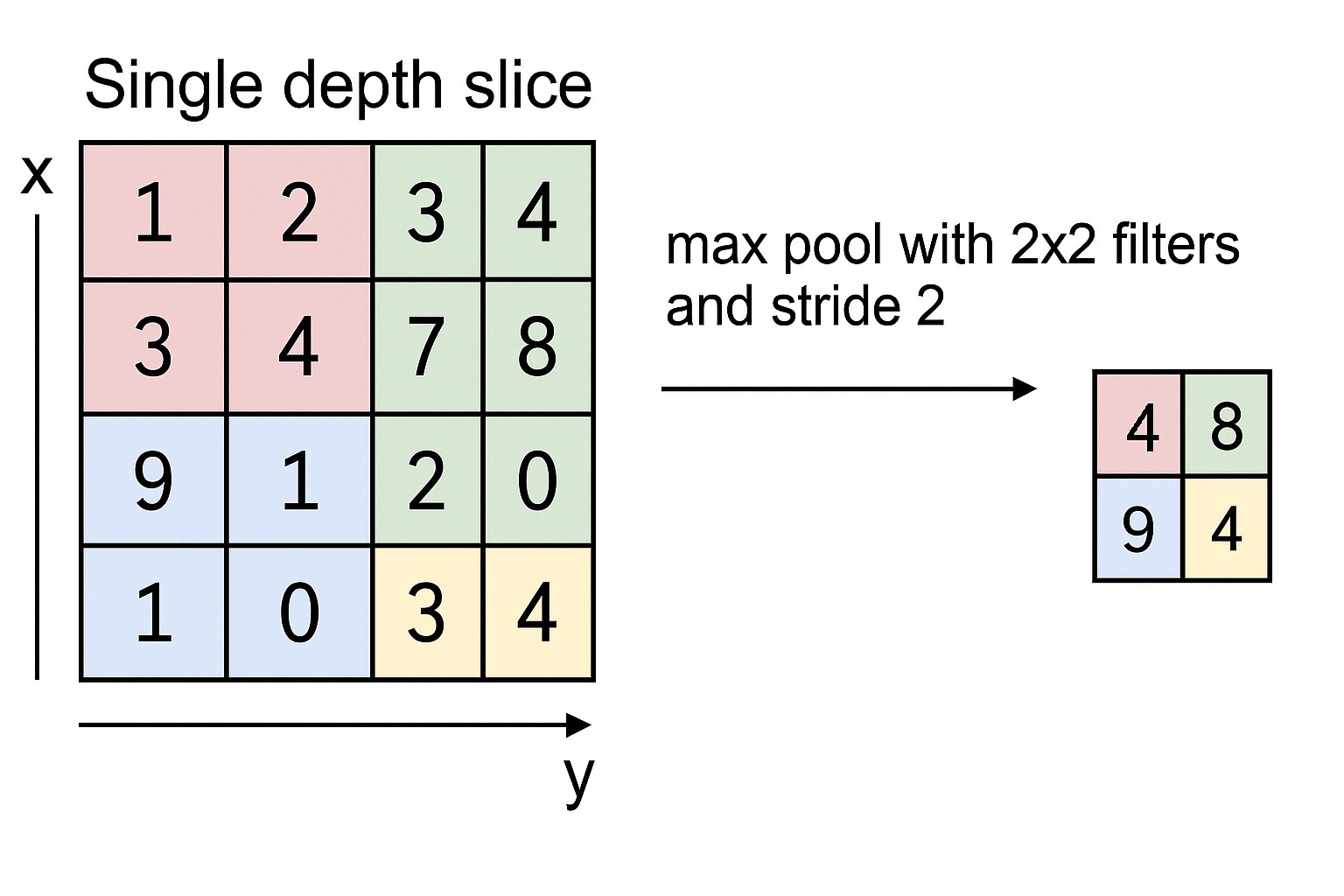
Example with a Simple 4x4 Feature Map
Suppose you have a 4x4 output from a Conv2D layer:
[ [1, 3, 2, 4],
[5, 6, 7, 8],
[2, 1, 4, 3],
[0, 2, 5, 6] ]Now apply:
MaxPooling2D(pool_size=(2, 2))It divides the matrix into 2x2 non-overlapping patches:
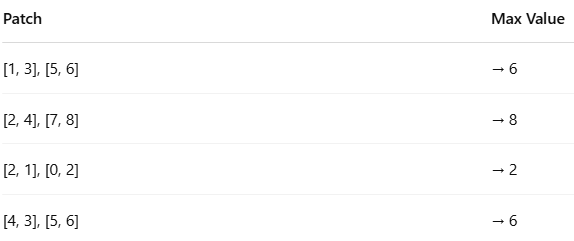
So the output becomes:
[ [6, 8],
[2, 6] ]
Result: Original 4x4 becomes 2x2 — dimensions halved.
Parameters of MaxPooling2D((2, 2))
Behind the Scenes: How It Works
Slides a 2x2 window across the input feature map
For each 2x2 patch, finds the maximum value
Places that max value in the new pooled feature map
This process:
Shrinks the image/feature map
Keeps only strongest features
Layer 3: Another Convolution
layers.Conv2D(64, (3, 3), activation='relu')This time we’re using 64 filters
No need to specify
input_shapeagain — it's inferred from the previous layer.
Analogy:
Deeper filters now learn more complex patterns: not just edges but maybe shapes like eyes, noses, digits, etc.
It’s like a detective going from “I see lines” → “I see a face!”
Why 64 Filters?
In early layers (like
Conv2D(32, ...)) → filters learn basic features like edges and corners.As we go deeper (like
Conv2D(64, ...)) → filters learn more detailed and abstract features like:Loops in digit '8'
Tails in '9'
Closed circles in '6' and '0'
So, 64 filters → allow the model to learn 64 different patterns or features from the earlier 32-feature representation.
Example Walkthrough
Let’s assume the output from the last layer is of shape:
13 x 13 x 32(From previous MaxPooling layer)
Now we apply:
Conv2D(64, (3, 3))Step-by-Step:
Each 3x3 filter slides across each of the 32 input channels
64 different filters will generate 64 new feature maps
The output shape becomes:
(13 - 3 + 1) x (13 - 3 + 1) x 64 = 11 x 11 x 64So now we have: ✔ Smaller spatial dimensions
✔ More depth (channels) — now 64
ReLU Activation
ReLU stands for:
Rectified Linear Unit → f(x) = max(0, x)ReLU replaces negative values with 0
Keeps positive values as is
Visualization Idea (Text-based)
Imagine this small 3x3 patch of previous output:
[ [0, 1, 2], [2, 1, 0], [1, 3, 1] ]And a random 3x3 filter:
[ [1, 0, -1], [1, 0, -1], [1, 0, -1] ]Do element-wise multiplication and sum:
= 0*1 + 1*0 + 2*(-1) + 2*1 + 1*0 + 0*(-1) + 1*1 + 3*0 + 1*(-1) = 0 + 0 -2 + 2 + 0 + 0 + 1 + 0 -1 = 0Then apply ReLU:
ReLU(0) = 0Layer 4: Max Pooling Again
layers.MaxPooling2D((2, 2))
Again, reducing the size by half.
Helps keep only essential features and reduces computation.
Layer 5: Flatten
layers.Flatten()What it does:
Converts 2D feature maps to 1D array to feed into dense layers.
Example:
If input was 5x5x64 → output becomes 1600 neurons in 1D
Analogy:
Imagine converting a chessboard into a row of 64 squares. You're unrolling a mat to feed it to a classifier.
1. Purpose of Flatten Layer in CNN:
Flatten Layer → Converts multi-dimensional data (output from Conv2D and Pooling layers) into a one-dimensional vector (1D array).
It acts like a "Bridge" between the Convolutional Layers (Feature Extraction) and the Dense Layers (Classification).
2. What Problem does Flatten Solve?
CNN Feature Map Output looks like this:
Example:
Shape = 5 x 5 x 645 Rows
5 Columns
64 Filters (Depth)
This is like a 3D cube of numbers.
But —
Dense (Fully Connected) Layers can only take:
1D Array (Vector) like [x1, x2, x3, ..., xn]Flatten layer does this conversion.
Real Example:
Input Feature Map from previous layer:
5 x 5 x 64 = 1600 numbersFlatten Layer will convert:
[ [ [x1, x2, ..., x64],
...
...
],
[ [x65, x66, ..., x128],
...
],
...
]
→ into:
[x1, x2, x3, ..., x1600]Now this 1D vector can go into:
layers.Dense(64, activation='relu')Output Size after Flatten:
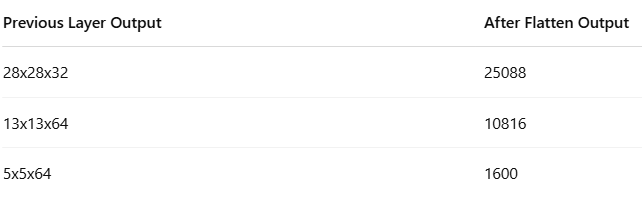
Formula:
Output = rows x columns x depthLayer 6: Dense Layer (Fully Connected)
layers.Dense(64, activation='relu')What is it?
A fully connected layer with 64 neurons.
Each of the 1600 outputs from the
Flatten()layer connects to all 64 neurons.Applies ReLU activation.
Purpose:
Combines and learns relationships between all extracted features.
Helps detect patterns like:
“If this edge exists AND this curve exists, then it's probably a 9”
Analogy:
Like a team of 64 detectives analyzing 1600 clues and deciding which are important.
Output Shape:
Input: 1600 values (from Flatten)
Output: 64 values
Layer 7: Output Layer
layers.Dense(10, activation='softmax')What is it?
Another fully connected layer, this time with 10 neurons — one for each class (digit 0 to 9).
Applies Softmax activation.
What Softmax Does:
It converts raw values into probabilities that sum up to 1.
Example input to softmax:
[3.2, 1.1, -2.0, 0.9, 5.0, 2.5, 1.2, 3.1, 0.7, 0.5]Softmax Output:
[0.01, 0.00, 0.00, 0.01, 0.92, 0.03, 0.01, 0.01, 0.00, 0.01]→ So, this means the model is 92% confident it's class 4.
Final Prediction Output
Example:
Prediction = [0.01, 0.00, ..., 0.92, 0.03]Means:
Class 0: 1% chance
Class 1: 0%
...
Class 4: 92%
Class 9: 3%
✅ So the model predicts:
Predicted Digit = np.argmax(Prediction) # Output: 46. Compile the Model
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])Optimizer:
adam→ Adaptive Learning Rate OptimizerLoss:
categorical_crossentropy→ For Multi-Class ClassificationMetrics:
accuracy
7. Train the Model
model.fit(X_train, y_train, epochs=5, batch_size=64, validation_split=0.1)Trains the model for 5 iterations (Epochs)
Batch size of 64
10% of training data used for validation.
8. Evaluate the Model
test_loss, test_acc = model.evaluate(X_test, y_test) print(f"Test Accuracy: {test_acc:.2f}")Evaluates the model performance on unseen test data.
Final Output:
Epoch 1/5 Train Accuracy increasing... Test Accuracy: 0.98Next Steps:
Ready to master CNNs?
Don't stop here—explore, experiment, and build your own convolutional neural networks. Check out my other deep learning tutorials and practical guides on AI, Python, and Machine Learning.Have questions or want to share your CNN journey?
Drop your insights and experiences in the comments or connect with me on LinkedIn—I’d love to hear from you!Keep exploring, keep innovating! 🌟
Happy Learning!
For more in-depth technical insights and articles, feel free to explore:
Girish Central
LinkTree: GirishHub – A single hub for all my content, resources, and online presence.
LinkedIn: Girish LinkedIn – Connect with me for professional insights, updates, and networking.
Ebasiq
Substack: ebasiq by Girish – In-depth articles on AI, Python, and technology trends.
Technical Blog: Ebasiq Blog – Dive into technical guides and coding tutorials.
GitHub Code Repository: Girish GitHub Repos – Access practical Python, AI/ML, Full Stack and coding examples.
YouTube Channel: Ebasiq YouTube Channel – Watch tutorials and tech videos to enhance your skills.
Instagram: Ebasiq Instagram – Follow for quick tips, updates, and engaging tech content.
GirishBlogBox
Substack: Girish BlogBlox – Thought-provoking articles and personal reflections.
Personal Blog: Girish - BlogBox – A mix of personal stories, experiences, and insights.
Ganitham Guru
Substack: Ganitham Guru – Explore the beauty of Vedic mathematics, Ancient Mathematics, Modern Mathematics and beyond.
Mathematics Blog: Ganitham Guru – Simplified mathematics concepts and tips for learners.